
















450J 750J机器人自动将低温摆撞击测试机器

产品详情
介绍
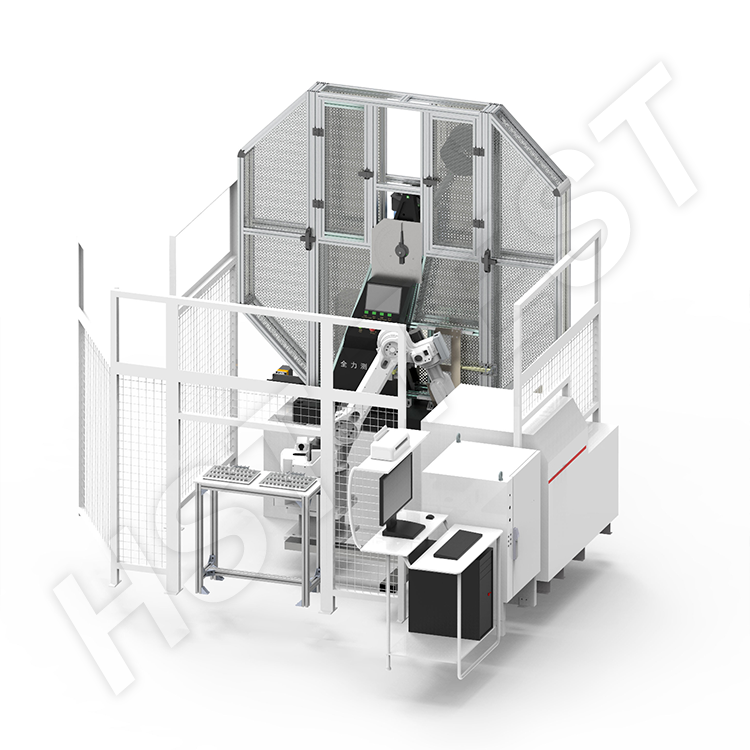
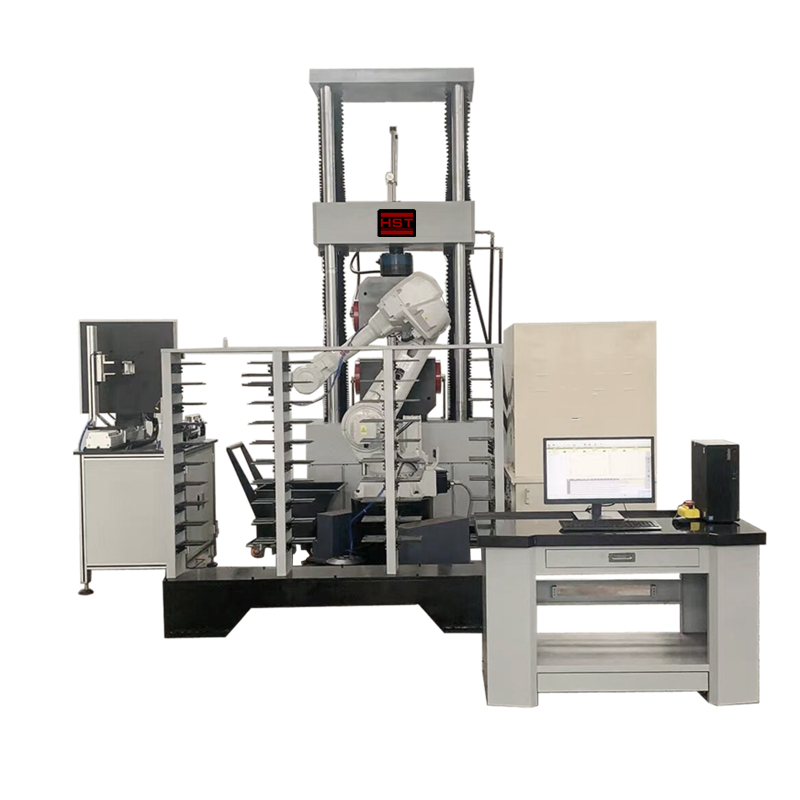
该机器配备了机器人系统,可以自动实现标本充电,进食和冲击测试。
特征
六轴机器人与样品夹一起拾取和运输样品的高灵活性;
机器人由视觉系统控制。通过识别样品的缺口特性,可以给机器人运动补偿,以达到0.1mm的凹口定位。
低温腔室的盖子自动打开并关闭,以实现采样时自动打开,并完成采样后自动关闭,以确保低温室中温度控制的准确性;
通过堆叠样品托盘并将40个样品存储在单个托盘中,以满足120个样品连续保持温暖的要求;
使用机器人自动样品喂养以使其操作更安全。
产品参数
模型 | HST450H-ar | HST750H-ar |
最大限度。影响能量(J) | 450 | 750 |
从支撑轴到打击乐中心的距离 | 750mm | |
标本数量 | 120 | |
标本喂养时间 | ≤4s | |
定位精度(MM) | 大于0.3 | |
可重复性(mm) | ±0.03 | |
标本(mm) | 2.5×10×55(换砧) | |
5×10×55 | ||
7.5×10×55 | ||
10×10×55 | ||
温度范围(℃) | 0〜 -80 | |
温度波动(℃) | ±0.5 | |
温度均匀性(℃) | ±1 | |
重量(kg) | 900(机器)+300(机器人) | |
电源 | 1期,220V±10%,50Hz,5.5kW | |
机器人,长度x宽度x高度,mm | 2100×835×1400 | |
占用空间(毫米2) | 4.5×2.8 |
下载
| Name | Download |
|---|
适用行业
相关产品


-
地址:山东省济南市槐荫区经十西路4715号
©2026 Jinan Kason测试设备有限公司